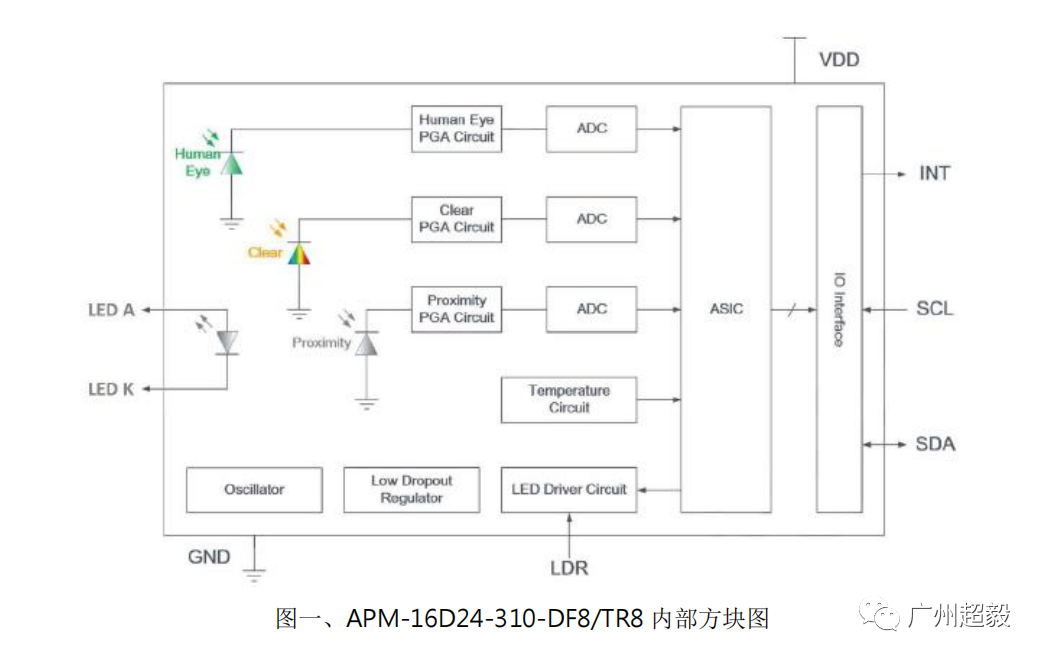
APM-16D24-310-DF8/TR8为数字I2C接口之传感器,其中整合了环境光感测组件(Ambient Light Sensor; ALS)、接近式感测(Proximity Sensor; PS)与红外线(IR)为一体之共同模块。
ALS 可以感测到和 人眼接收感觉类似的光源,并让相关的应用产品根据感测到的光源信息做相应的开、关及自动调整控制 (例如:暗环境下的补光或是降低屏幕背光亮度),以达到省电及安全的目的;PS 则是跟 IR 搭配用来侦 测物体距离的远或近,以此控制产品的开或关。
环境光感测部分:照度(Illuminance)转换方式:
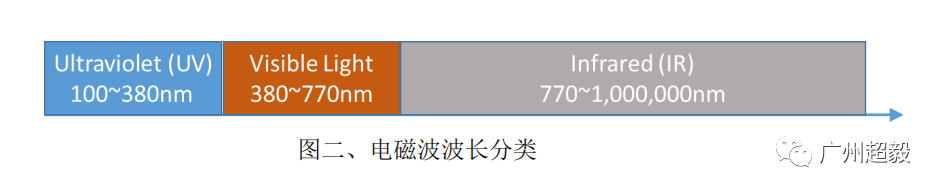
地球上充满了各种波长的电磁波,依波长从短到长可分为紫外线(Ultraviolet; UV)、可见光(Visible Light)及红外线(Infrared; IR),而照度定义的可见光为人眼可见的电磁频谱,其波长为 380~770nm, 而 ALS 主要就是侦测此段波长的电磁波强度。
在380~770nm 的可见光波段中,在较明亮环境中人眼对 555nm 波长的绿色光最为敏感,而假设其他可见光波长跟 555nm 的光产生同样亮暗感觉所需的光通量为 X(λ),则 555nm 的光通量和其他X(λ)的比值可描出所谓的视见函数(visual sensitivity function)。照度的定义是需参考视见函数的,因不同的光源在不同的波长会有不同的辐射强度,而 ALS 的镀膜并不会跟视见函数完全相同,故 ALS 得到的 Count 值须经过转换才能得到照度值(Lux)。不同光谱的光源可能会得到不同的 Count 值,这样换算出的照度值也会有差异。
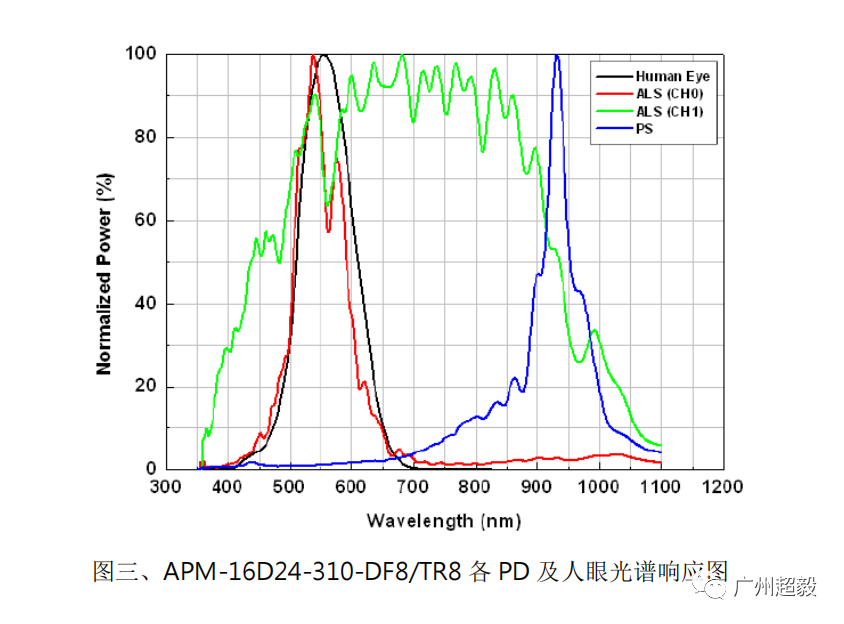
亿光的 APM-16D24-310-DF8/TR8 因内部封有三颗不同镀膜的光二极管(Photo Diode; PD),如下图三,不同的 PD 对不同光谱的光会有不同响应,利用此特性可区分出不同的光源,然后根据不同的光源给予不同的换算公式,如此可解决上述相同照度下,不同光谱的光源若用相同公式会得到不同照度值的问题。
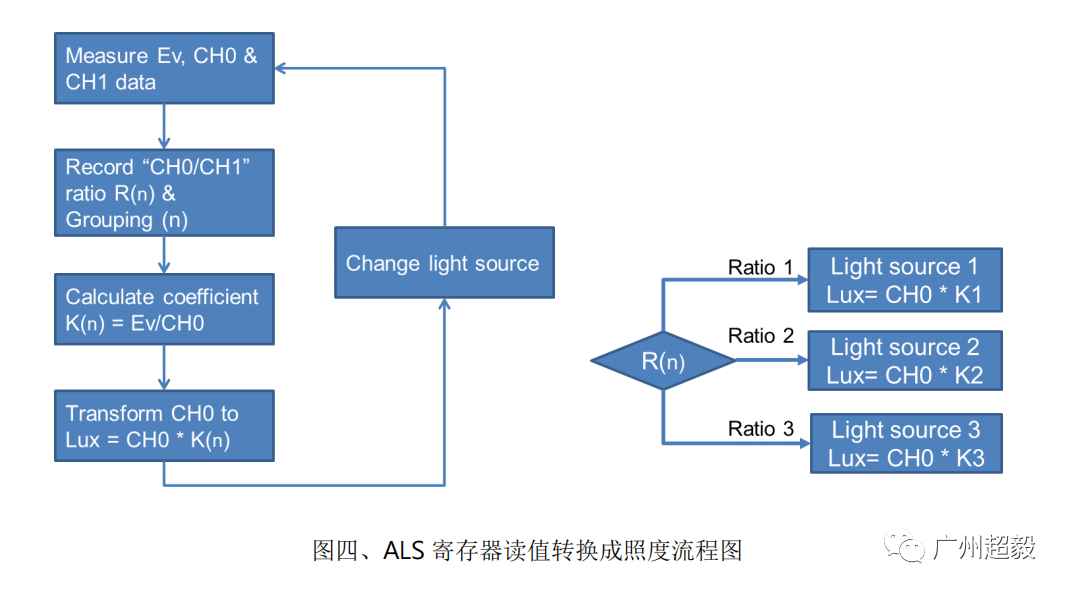
把 ALS channel 读到的 count 值转换成照度流程如下:
1. 准备不同的光源,例如:白光 LED、荧光灯、白炽灯及标准光源 D65…等,还有标准件(标准照度计)。
2. 使用第一种光源同时照射ALS及照度计,接着纪录照度计的读值Ev,并适当调整寄存器(Register) ALS_GAIN(0x04)及 ALS_TIME(0x05)的设定,同时记录 ALS CH0(0x1C, 0x1D)及 CH1(0x1E, 0x1F)的读值。调整时,需考虑最大使用环境照度,设计当 ALS 的输出饱和时的处理。
3. 把 CH0/CH1 的比值当成 R(1)。
4. 计算系数 K(1) = Ev/CH0。
5. 此光源的照度 Lux = CH0 * K(1)
6. 换第二种光源并重复上述步骤 1~5,可得到不同的比值 R(n)及系数 K(n)。
7. 把相对应的光源跟比值 R(n)及系数 K(n)搭配就可得到不同光源的 Lux 转换公式。
接近感测(PS)部分:
接近式传感器通常使用在判断物体与 APM 距离之远、近。其原理为利用 IR LED 发射红外线并靠APM内的PD侦测被物体反射回来的红外线强度,利用其所侦测到的强度来判断距离远近。
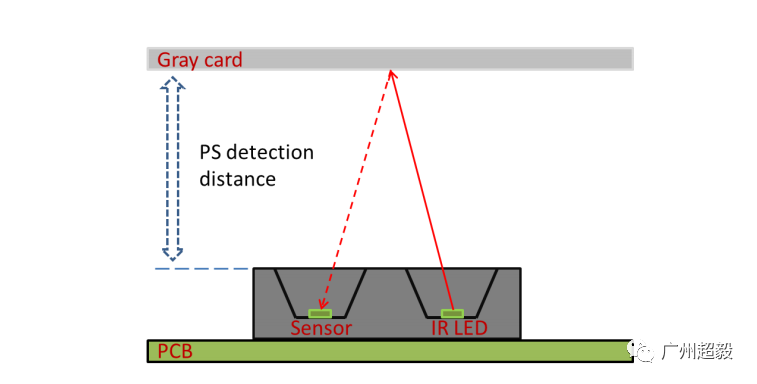
因外部环境可能也会有 IR 成分的干扰存在,为避免干扰,APM 并不会持续不间断的发射 IR,而是利用脉冲(Pulse)的方式并侦测有发射及无发射时的变异量,判断是否为物体接近时反射的 IR。当物体越靠近传感器,则 APM 读到的的数值就会越高,把不同距离得到的读值记录下来可画出类似图六的距离跟 APM 读值关系图。
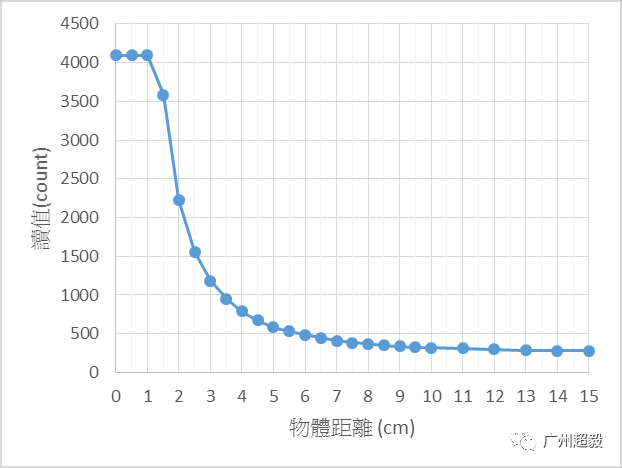
不同的材料会有不同的反射率。颜色越深,表面越粗糙的物体反射率越差,得到的读值及画出的曲线也会不同。
不同的寄存器(Register)设定会得到不同的特性曲线。
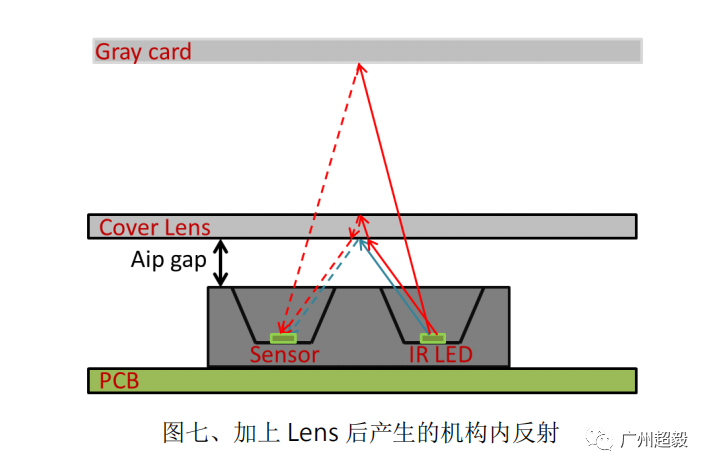
上图发现在侦测距离最远时的读值不为 0,原因是若 ID 设计不想让使用者直接看到 APM本体,通常会在 APM 上方加半透明的 cover lens,而此 lens 会造成 IR 在机构内反射,使得 APM 会有一背景噪声存在。
而APM 及 lens 间的间隙(gap)也会影响 PS 的性能
更多数位环境光及接近感测器APM-16D24-310产品信息,联系超毅电子索取详细规格书及技术交流。